
前言
什么是多文件编程?这里要讲到工程项目的概念,项目往往可以分成硬件层和应用层,硬件层包含项目各个硬件的基础接口,而应用层则是在这众多硬件之间牵线搭桥,完成用户与硬件之间的交互。如果你只是写个点灯的程序,那大可不必谈及什么工程项目,但是如果你想要DIY一个小项目,那么就很有必要了解一下,因为这是一个很好的练手机会。
文件结构
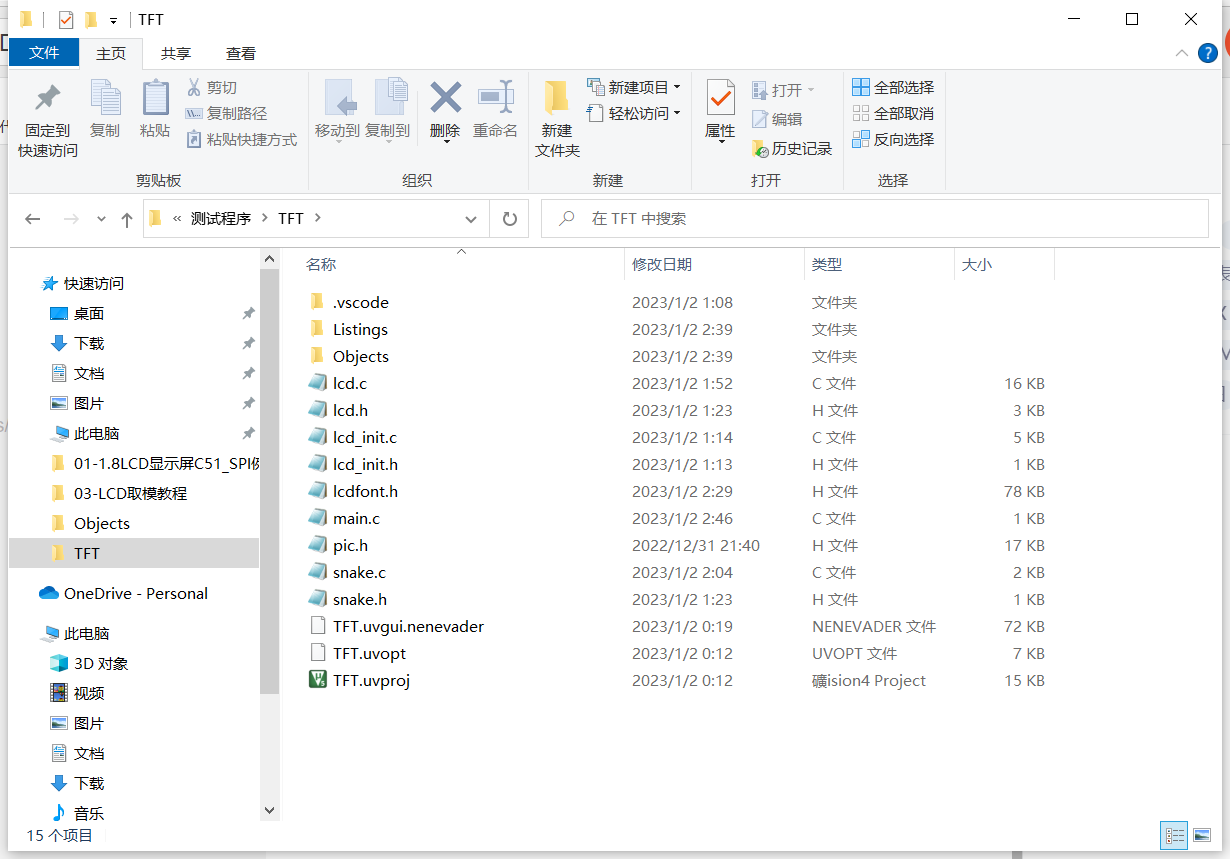
下面的图片是一个MPU6050的项目,项目被细分成多个部分,各个部分又单独有.c文件和.h文件,从而大大提高了程序代码移植率,避免程序看起来臃肿复杂
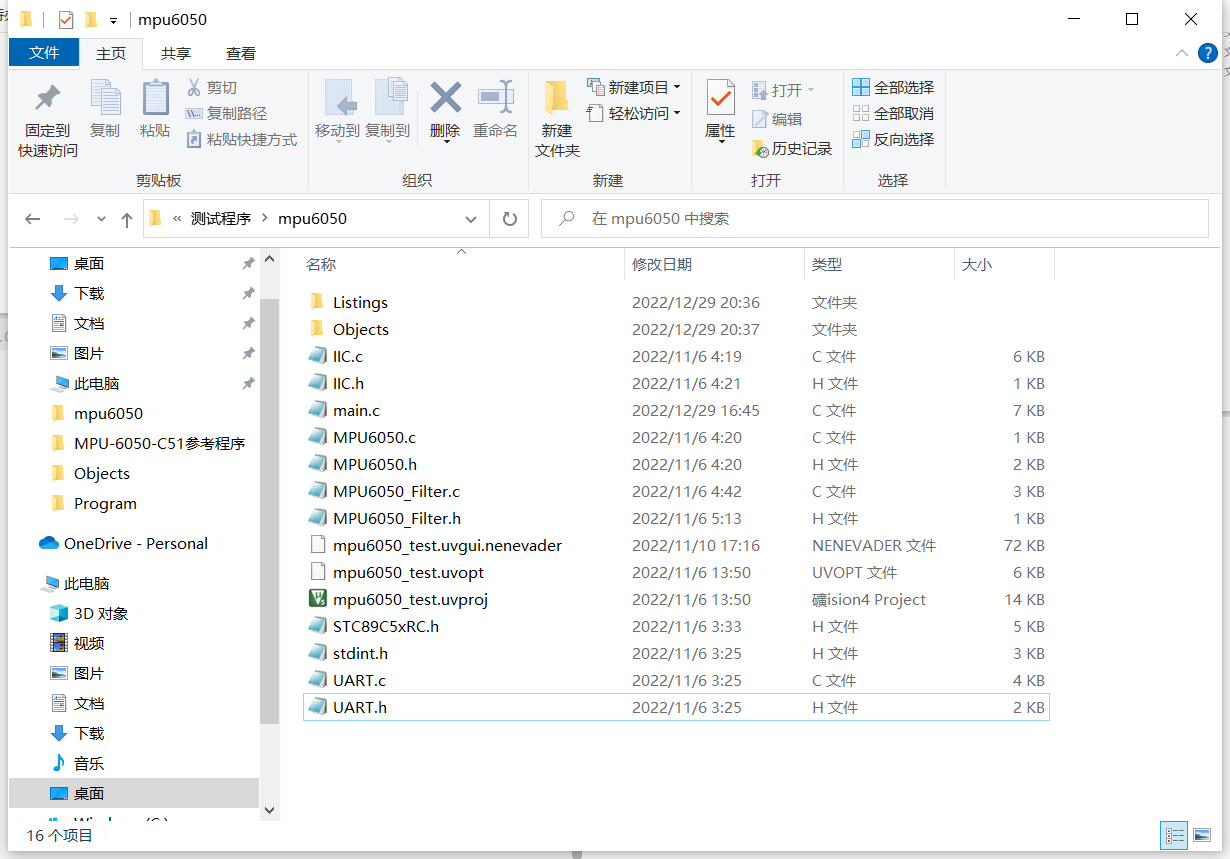
对于硬件不多的情况,所有文件散乱在一起也无伤大雅,但如果项目有几十甚至上百个文件时,这样就不适合使用和管理了,尤其在多人维护代码时,这样会严重拉低效率,我们还需要一个框架,可以把文件分门别类地存放到各个文件夹,方便区别和查找。下面以一个常用的文件框架为例:
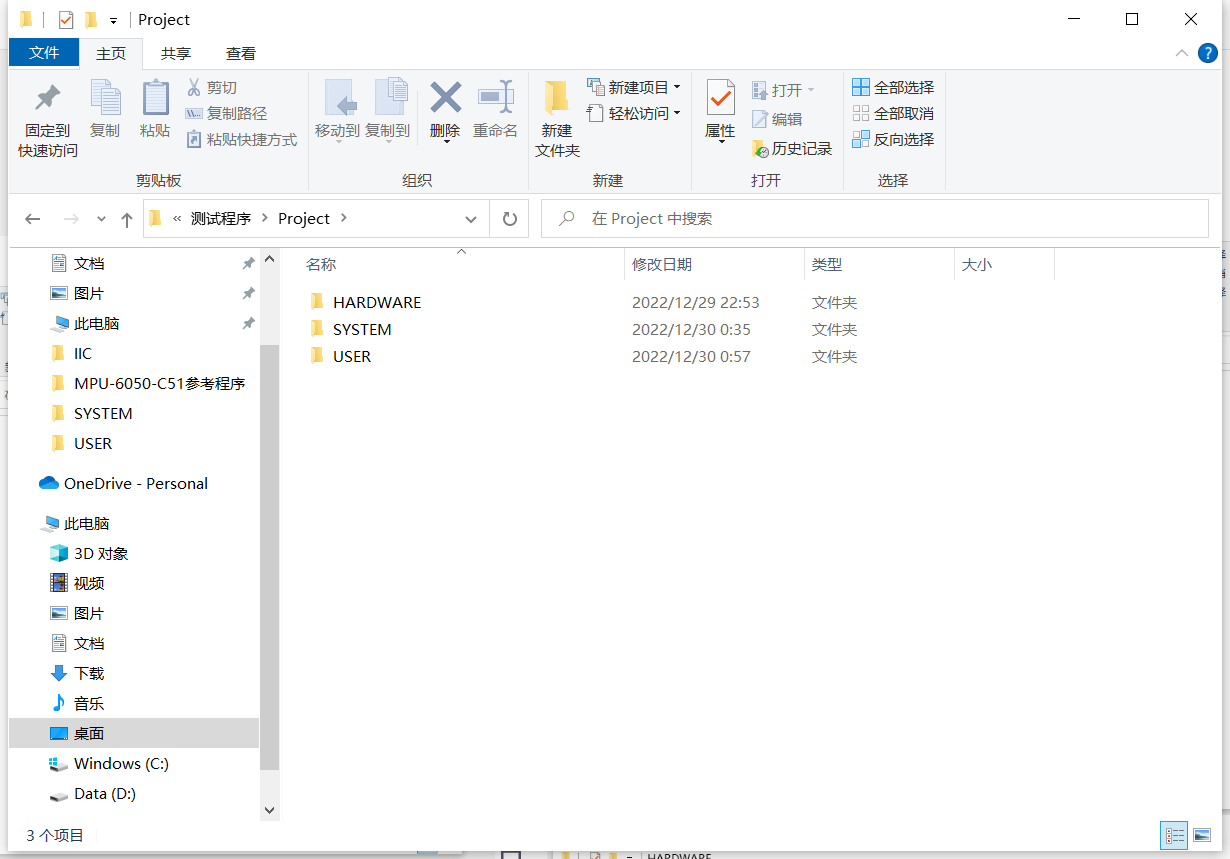
首先,我们创建一个工程文件夹,在该文件夹内建立3个文件夹,分别是HARDWARE、SYSTEM和USER
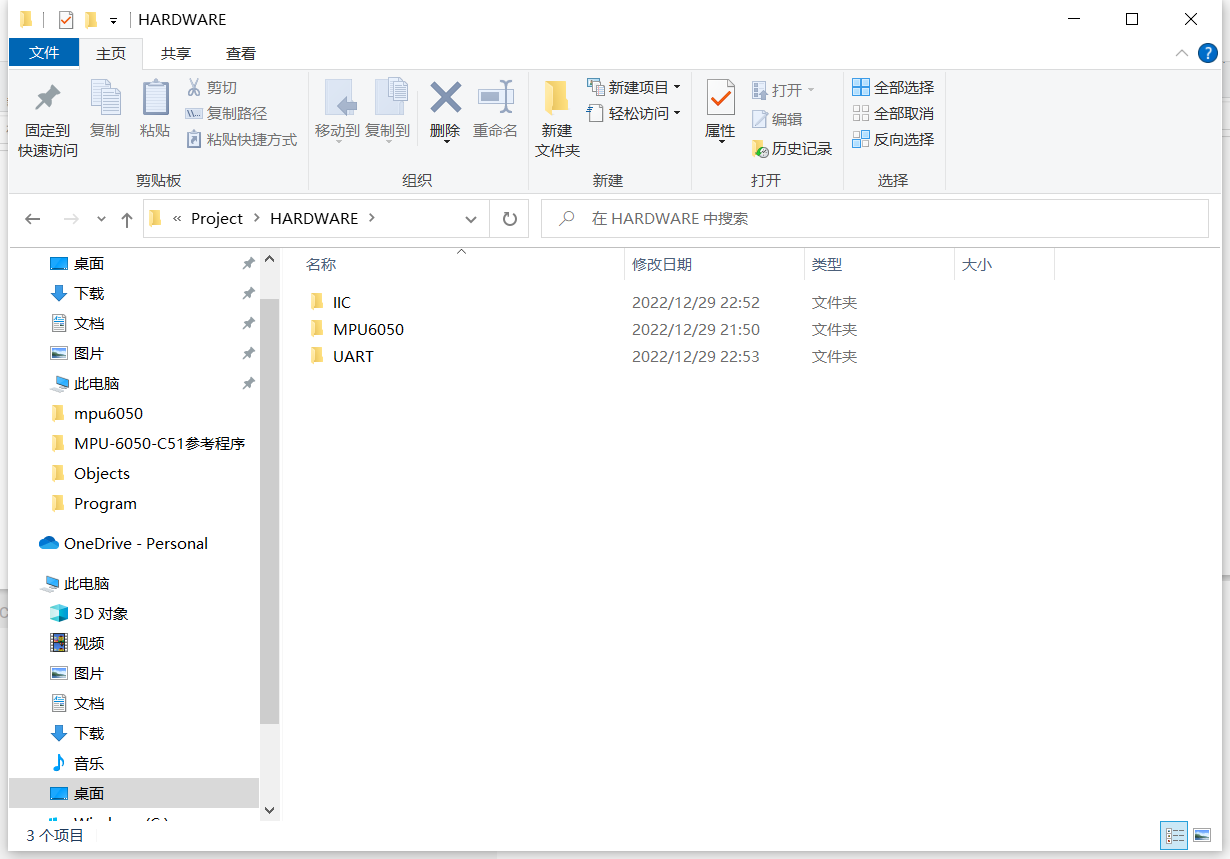
HARDWARE :用于存放各种外设模块
SYSTEM:用于定义引脚以及一些系统程序
USER:用于存放工程文件和main.c文件
创建工程
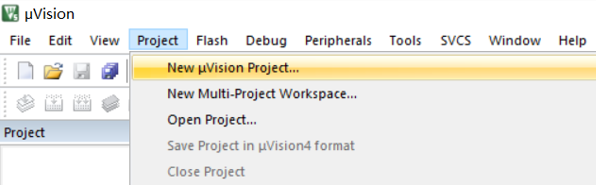
- 点Project,再点New uVision Project,新建一个工程
-
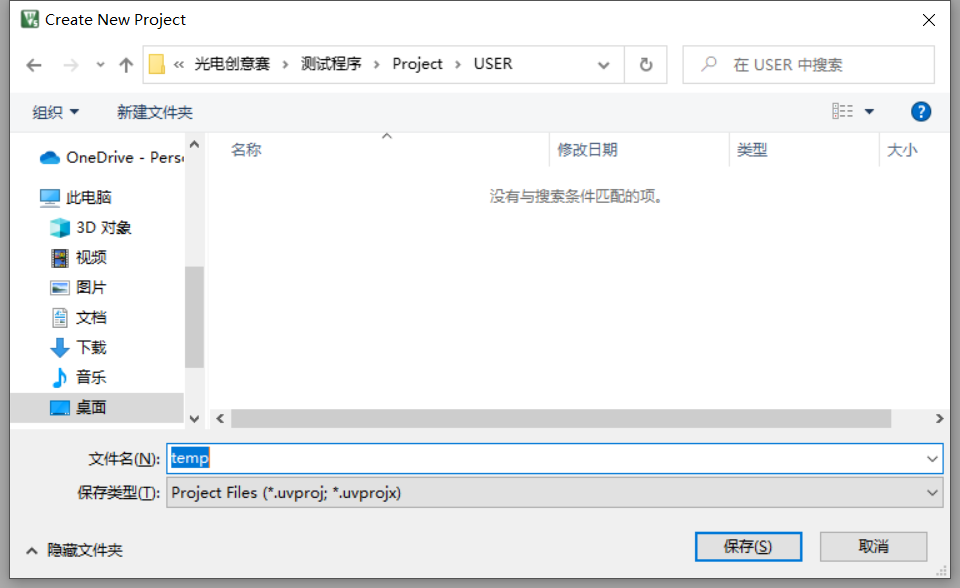
给创建的工程命名,并存到USER文件夹中
-
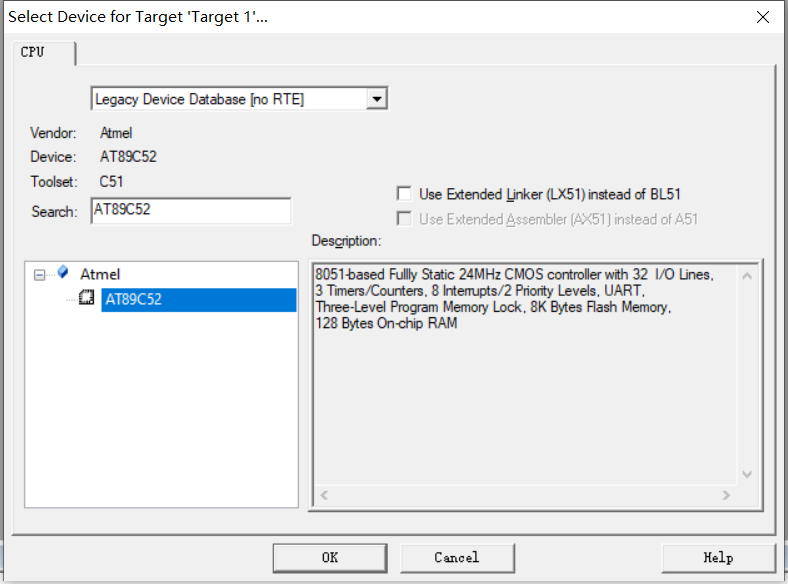
选择单片机型号,这里随便选择AT89C52,不重要
-
直接点否,这个文件没啥用
-
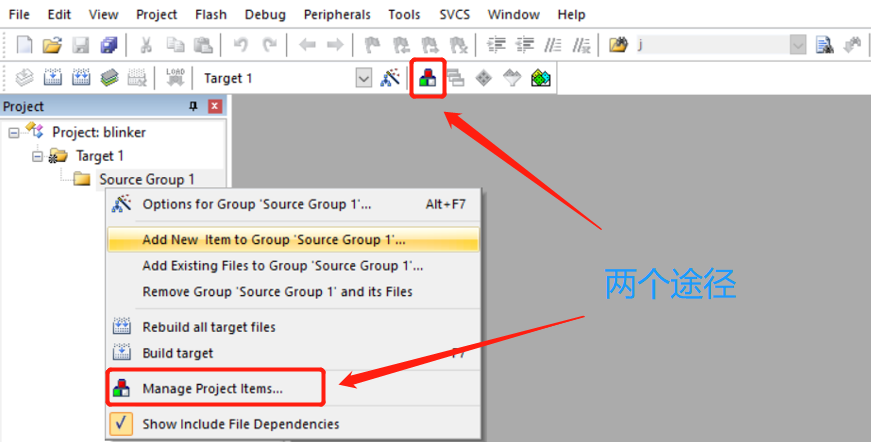
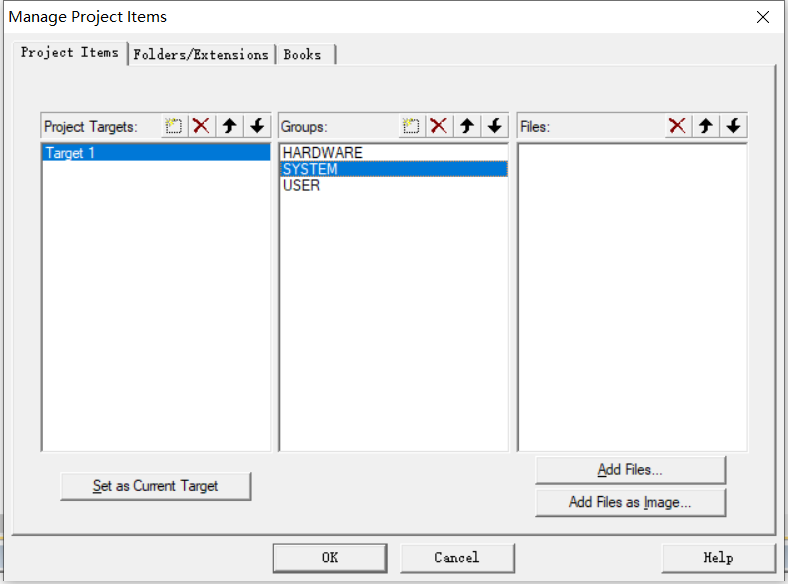
点Manage Project Items,有两个打开的方式
-
创建Groups,以文件夹命名,确定
-
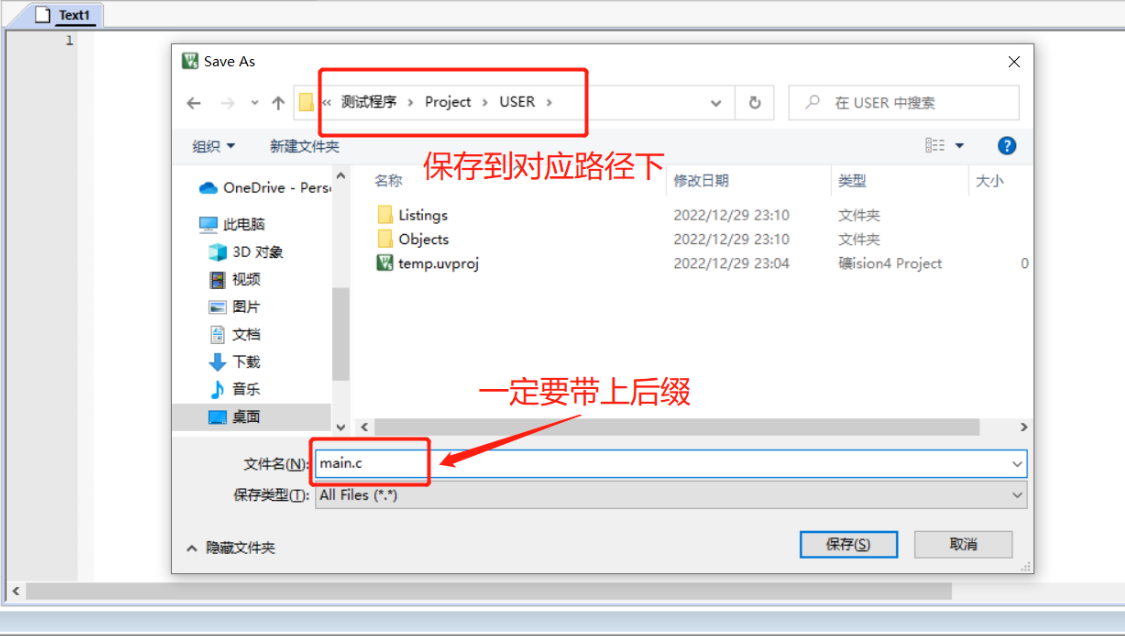
Ctrl+N添加新文件,Ctrl+S命名并保存到各自的路径
-
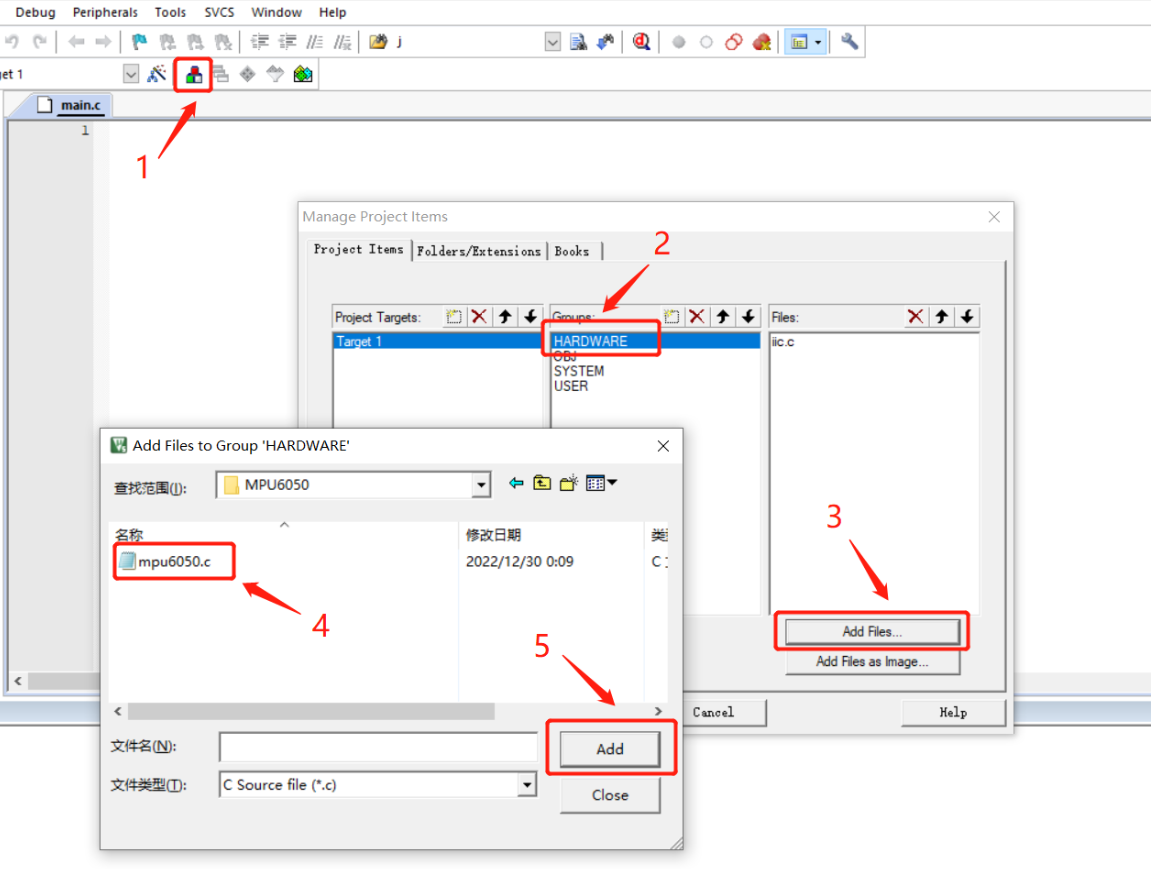
上一步保存的文件只是创建在文件夹里了,还没有添加到项目里,下面需要把文件添加到相应Groups
-
c文件只能include同一文件夹下的h文件,因此必须把各个h文件的路径添加到
Include Paths,若文件如第一张图,则无需此步骤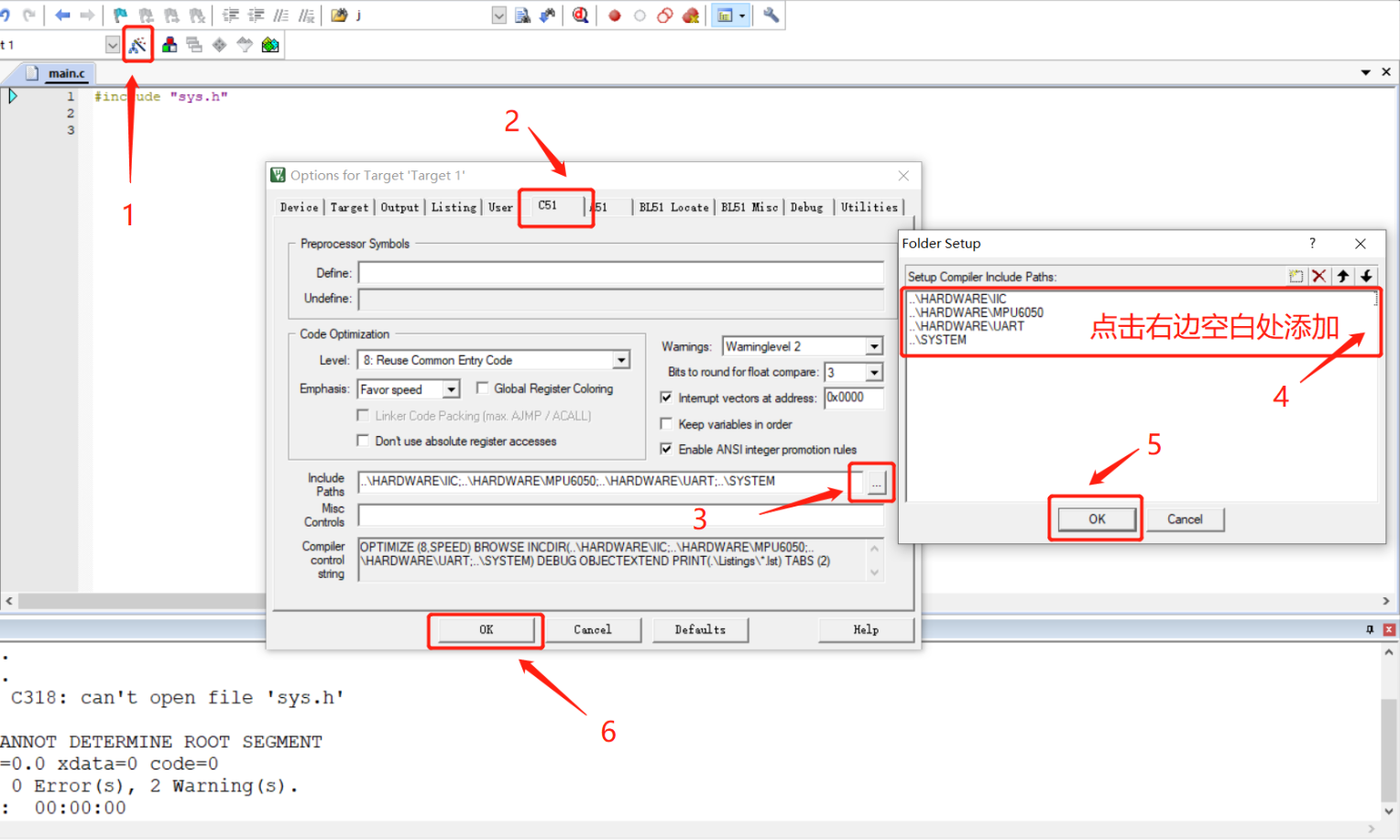
-
右击h文件名,可以看到
open document "",表示include的h文件路径没问题可以打开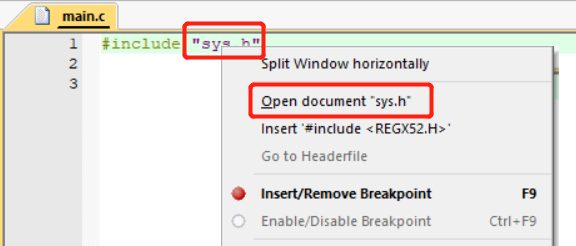
-
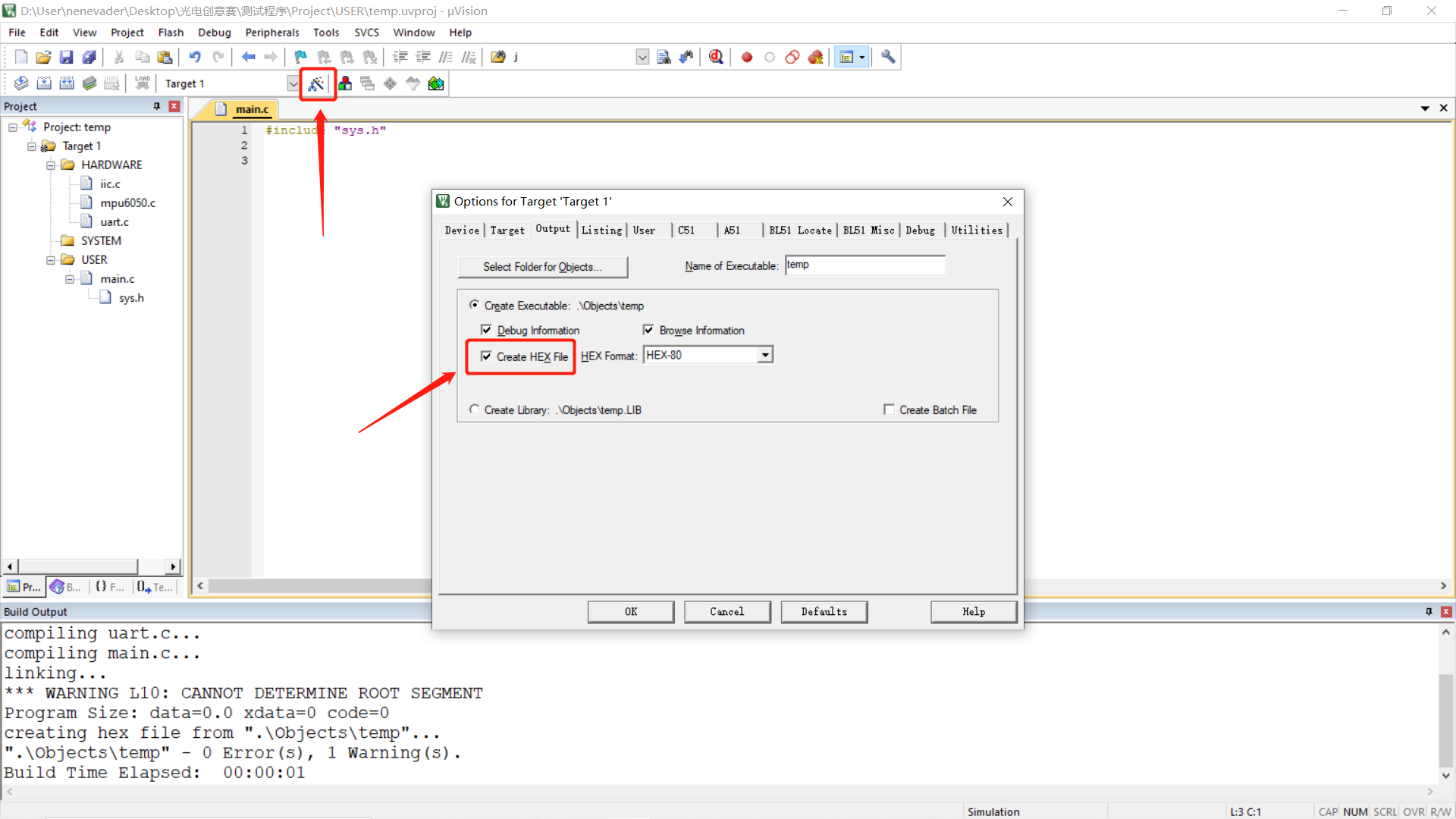
最后点击魔法棒,勾选生成HEX文件
多文件编程
头文件
头文件的写法非常讲究,它是变量和函数声明的地方,每个声明相当于一条“链接”,其他文件想要使用到某个变量或函数时,只需包含对应头文件,就能通过对应“链接”实现访问了
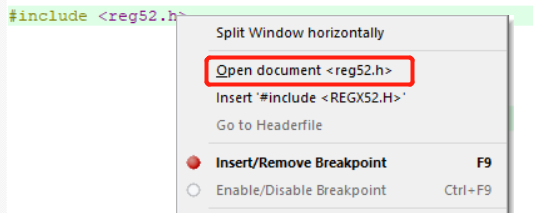
感兴趣的可以学习模仿官方的一些头文件,只需右击include所在的行,就可以打开它的头文件
源文件
对于源文件(.c),主要用来定义变量和函数,值得注意的是,main函数只能写在一个文件,一般选择main.c
这里和头文件的关系在于,源文件主要负责定义,而头文件只能作声明(不包括宏定义)。那么,定义和声明有什么区别呢?
- 定义
这是一个定义:int i = 0;
当然,如果定义的是全局变量/静态变量,默认赋值0也算是定义了 -
声明
这是一个声明:extern int i;
是不是区别不大?但是如果声明写成定义,往往会出现重定义的错误
对于函数的声明:void delay(unsigned i);
同样的,函数定义的内容也被省去了
全局变量
说到全局变量,有必要再复习一下变量的分类,变量可以分为全局变量、局部变量、静态全局变量和静态局部变量
- 全局变量
也叫外部变量,定义在函数外,可以被定义位置之后的函数访问,可以跨文件访问,外部文件只需使用extern声明变量即可 -
局部变量
定义在函数内,只能在函数内被使用,跳出函数后,变量内存被释放(一次性变量) -
静态全局变量
在全局变量前加上关键字static,变量只能作用于定义的文件,不能被跨文件访问(限制作用域) -
静态局部变量
在局部变量前加上关键字static,变量还是只能在函数内使用,但是存储空间不同,变量不会在跳出函数后被释放了(延长保质期)
示例代码
以开发资料的MPU6050例程为例,还添加了上一节教程的内容
main.c
#include "sys.h"
void main()
{
while(1)
{
unsigned int time; // 保存定时器计数值
float halfT; // 每次采样的时间
int Ax,Ay,Az,Gx,Gy,Gz; // 加速度计和陀螺仪的原始数据
unsigned long Gravity;
float AngleX1,AngleY1,AngleZ1,AngleX2,AngleY2,AngleZ2=0,dx,dy,dz;
float Filter;
Filter=0.8; //互补滤波系数
delay(500); //上电延时
init_uart();
InitMPU6050(); ////初始化MPU6050
delay(150);
while(1)
{
Ax=GetData(ACCEL_XOUT_H);
Ay=GetData(ACCEL_YOUT_H);
Az=GetData(ACCEL_ZOUT_H);
Gx=GetData(GYRO_XOUT_H);
Gy=GetData(GYRO_YOUT_H);
Gz=GetData(GYRO_ZOUT_H);
TR0 = 0;
time = (TH0<<8)|TL0;
halfT = (time/1000000.)*(12/11.0592);
// Display10BitData((int)(halfT*1000000)); //显示采样时间
TH0 = 0;
TL0 = 0;
TR0 = 1;
Gravity=sqrt((float)Ax*Ax+(float)Ay*Ay+(float)Az*Az); //Ax*Ax+Ay*Ay+Az*Az
AngleX1=acos((float)Ax/Gravity)*180.0/3.14-90;;
AngleY1=acos((float)Ay/Gravity)*180.0/3.14-90;
AngleZ1=acos((float)Az/Gravity)*180.0/3.14;
dy=halfT*Gx/-16.4; //陀螺仪测的转角y
dx=halfT*Gy/16.4; //陀螺仪测的转角x
dz=halfT*Gz/16.4; //陀螺仪测的转角z
//x和y轴数据是融合加速度计和陀螺仪数据, z轴只采用陀螺仪数据
AngleX2=Filter*(AngleX2+dx)+(1-Filter)*AngleX1;
AngleY2=Filter*(AngleY2+dy)+(1-Filter)*AngleY1;
// z轴数据有两种方式,一种是只使用陀螺仪的数据,舍弃z轴加速度(z轴零飘严重):
AngleZ2=AngleZ2+dz; // 注意MPU6050必须芯片正面朝上
SeriPushSend(0x20);SeriPushSend('X'); SeriPushSend(':');
Display10BitData((int)AngleX2); //显示X轴角度
SeriPushSend(0x20);SeriPushSend('Y'); SeriPushSend(':');
Display10BitData((int)AngleY2); //显示Y轴角度
SeriPushSend(0x20);SeriPushSend('Z'); SeriPushSend(':');
Display10BitData((int)AngleZ2); //显示Z轴角度
SeriPushSend(0x0d);
SeriPushSend(0x0a);//换行,回车
delay(500); // 控制采样频率
}
}
}
sys.c
#include "sys.h"
//*************************************************************************************************
//************************************延时*********************************************************
//*************************************************************************************************
void delay(unsigned int k)
{
unsigned int i,j;
for(i=0;i<k;i++)
{
for(j=0;j<121;j++);
}
}
//************************************************************************************************
//延时5微秒(STC90C52RC@12M)
//不同的工作环境,需要调整此函数
//注意当改用1T的MCU时,请调整此延时函数
//************************************************************************************************
void Delay5us()
{
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
}
sys.h
#ifndef __SYS_H_
#define __SYS_H_
typedef unsigned char uchar;
typedef unsigned short ushort;
typedef unsigned int uint;
//****************************************
#include <REG52.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
#include "iic.h"
#include "mpu6050.h"
#include "uart.h"
//**************************************************************************************************
//函数声明
//**************************************************************************************************
void Delay5us();
void delay(unsigned int k); //延时
#endif
iic.c
#include "iic.h"
//****************************************
// 定义51单片机端口
//****************************************
sbit SCL=P1^5; //IIC时钟引脚定义
sbit SDA=P1^4; //IIC数据引脚定义
//****************************************
//*************************************************************************************************
//I2C起始信号
//*************************************************************************************************
void I2C_Start()
{
SDA = 1; //拉高数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 0; //产生下降沿
Delay5us(); //延时
SCL = 0; //拉低时钟线
}
//*************************************************************************************************
//I2C停止信号
//*************************************************************************************************
void I2C_Stop()
{
SDA = 0; //拉低数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 1; //产生上升沿
Delay5us(); //延时
}
//**************************************************************************************************
//I2C发送应答信号
//入口参数:ack (0:ACK 1:NAK)
//**************************************************************************************************
void I2C_SendACK(bit ack)
{
SDA = ack; //写应答信号
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
//****************************************************************************************************
//I2C接收应答信号
//****************************************************************************************************
bit I2C_RecvACK()
{
SCL = 1; //拉高时钟线
Delay5us(); //延时
CY = SDA; //读应答信号
SCL = 0; //拉低时钟线
Delay5us(); //延时
return CY;
}
//*****************************************************************************************************
//向I2C总线发送一个字节数据
//*****************************************************************************************************
void I2C_SendByte(uchar dat)
{
uchar i;
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1; //移出数据的最高位
SDA = CY; //送数据口
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
I2C_RecvACK();
}
//*****************************************************************************************************
//从I2C总线接收一个字节数据
//******************************************************************************************************
uchar I2C_RecvByte()
{
uchar i;
uchar dat = 0;
SDA = 1; //使能内部上拉,准备读取数据,
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1;
SCL = 1; //拉高时钟线
Delay5us(); //延时
dat |= SDA; //读数据
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
return dat;
}
//*****************************************************************************************************
//向I2C设备写入一个字节数据
//*****************************************************************************************************
void Single_WriteI2C(uchar REG_Address,uchar REG_data)
{
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //内部寄存器地址,
I2C_SendByte(REG_data); //内部寄存器数据,
I2C_Stop(); //发送停止信号
}
//*******************************************************************************************************
//从I2C设备读取一个字节数据
//*******************************************************************************************************
uchar Single_ReadI2C(uchar REG_Address)
{
uchar REG_data;
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress); //发送设备地址+写信号
I2C_SendByte(REG_Address); //发送存储单元地址,从0开始
I2C_Start(); //起始信号
I2C_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=I2C_RecvByte(); //读出寄存器数据
I2C_SendACK(1); //接收应答信号
I2C_Stop(); //停止信号
return REG_data;
}
iic.h
#ifndef __IIC_H_
#define __IIC_H_
#include "sys.h"
void I2C_Start();
void I2C_Stop();
void I2C_SendACK(bit ack);
bit I2C_RecvACK();
void I2C_SendByte(uchar dat);
uchar I2C_RecvByte();
void Single_WriteI2C(uchar REG_Address,uchar REG_data);
uchar Single_ReadI2C(uchar REG_Address);
#endif
mpu6050.c
#include "mpu6050.h"
//******************************************************************************************************
//初始化MPU6050
//******************************************************************************************************
void InitMPU6050()
{
Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态
Single_WriteI2C(SMPLRT_DIV, 0x07);
Single_WriteI2C(CONFIG, 0x06);
Single_WriteI2C(GYRO_CONFIG, 0x18);
Single_WriteI2C(ACCEL_CONFIG, 0x01);
}
//******************************************************************************************************
//合成数据
//******************************************************************************************************
int GetData(uchar REG_Address)
{
uchar H,L;
H=Single_ReadI2C(REG_Address);
L=Single_ReadI2C(REG_Address+1);
return ((H<<8)+L); //合成数据
}
mpu6050.h
#ifndef __MPU6050_H_
#define __MPU6050_H_
#include "sys.h"
//****************************************
// 定义MPU6050内部地址
//****************************************
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
#define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取
//**************************************************************************************************
void InitMPU6050();
int GetData(uchar REG_Address);
#endif
uart.c
#include "uart.h"
//**************************************************************************************************
//定义类型及变量
//**************************************************************************************************
uchar dis[6]; //显示数字(-511至512)的字符数组
int dis_data; //变量
//**************************************************************************************************
//********************************************************************************
//整数转字符串
//********************************************************************************
void lcd_printf(uchar *s,int temp_data)
{
if(temp_data<0)
{
temp_data=-temp_data;
*s='-';
}
else *s=' ';
*++s =temp_data/10000+0x30;
temp_data=temp_data%10000; //取余运算
*++s =temp_data/1000+0x30;
temp_data=temp_data%1000; //取余运算
*++s =temp_data/100+0x30;
temp_data=temp_data%100; //取余运算
*++s =temp_data/10+0x30;
temp_data=temp_data%10; //取余运算
*++s =temp_data+0x30;
}
//******************************************************************************************************
//串口初始化
//*******************************************************************************************************
void init_uart()
{
TMOD=0x21;
TH1=0xfd; //实现波特率9600(系统时钟11.0592MHZ)
TL1=0xfd;
SCON=0x50;
PS=1; //串口中断设为高优先级别
//TR0=1; //启动定时器
TR1=1;
//ET0=1; //打开定时器0中断
ES=1;
EA=1;
}
//*************************************************************************************************
//串口发送函数
//*************************************************************************************************
void SeriPushSend(uchar send_data)
{
SBUF=send_data;
while(!TI);TI=0;
}
//******************************************************************************************************
//超级终端(串口调试助手)上显示10位数据
//******************************************************************************************************
void Display10BitData(int value)
{ uchar i;
// value/=64; //转换为10位数据
lcd_printf(dis, value); //转换数据显示
for(i=0;i<6;i++)
{
SeriPushSend(dis[i]);
}
// DisplayListChar(x,y,dis,4); //启始列,行,显示数组,显示长度
}
uart.h
#ifndef __UART_H_
#define __UART_H_
#include "sys.h"
void lcd_printf(uchar *s,int temp_data);
void init_uart();
void SeriPushSend(uchar send_data);
void Display10BitData(int value);
#endif
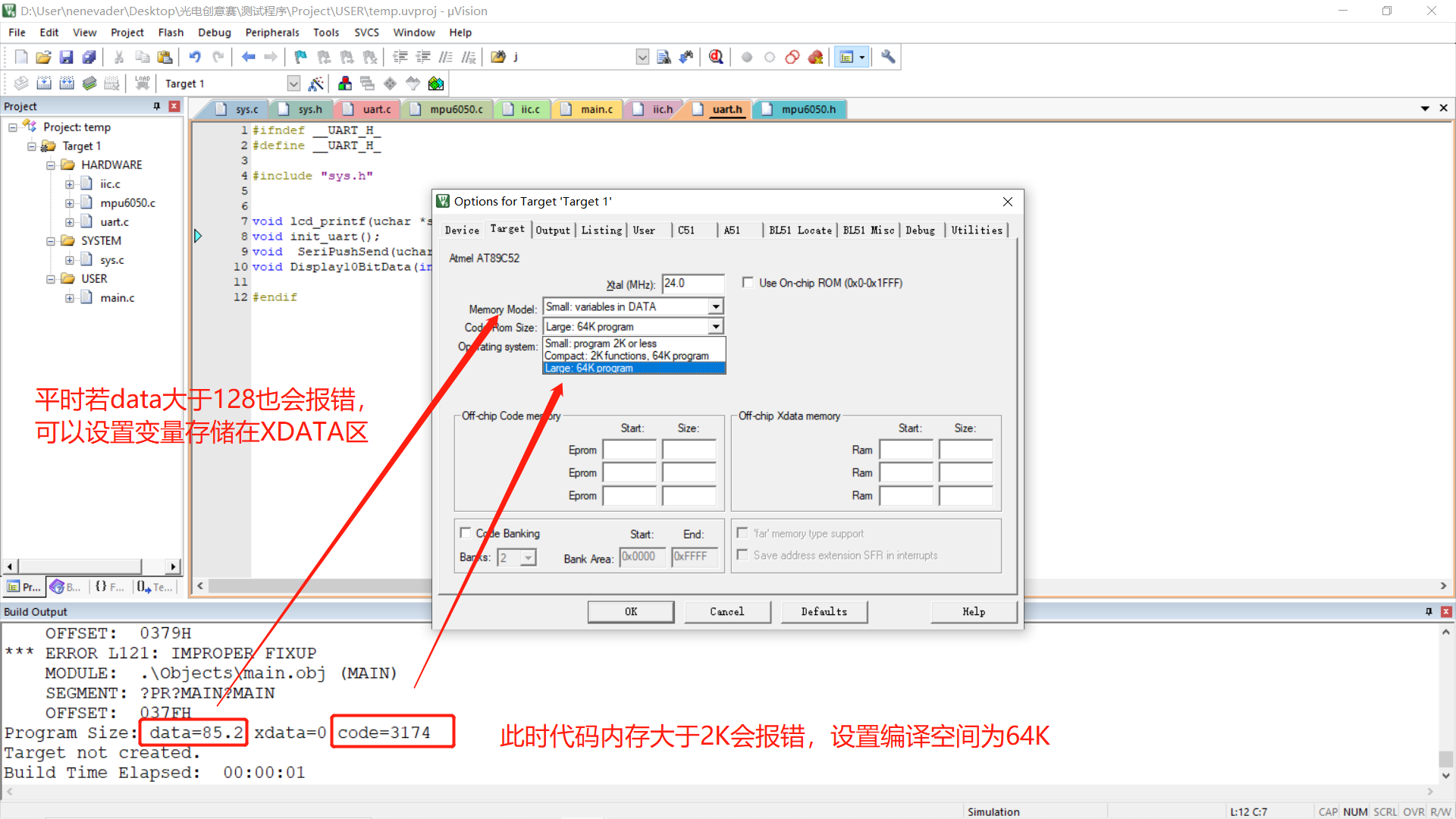
编译设置

暂无评论
要发表评论,您必须先 登录